View more →
View more >>
聪明的脑子,笨拙的手脚—具身智能”最后一公里”挑战
从深度感知、智能协同到精密执行,提供工业级高可靠软硬件一体化解决方案
虹科及旗下姐妹公司(友思特、康谋、宏集、德思特)深刻理解这“最后一公里”难题。我们提供的不只是零部件,而是覆盖“感知-思考-行动”全链路的一站式解决方案,旨在帮助人形机器人及具身智能研发团队,将前沿的智能构想转化为稳定、可靠、经济的物理现实!
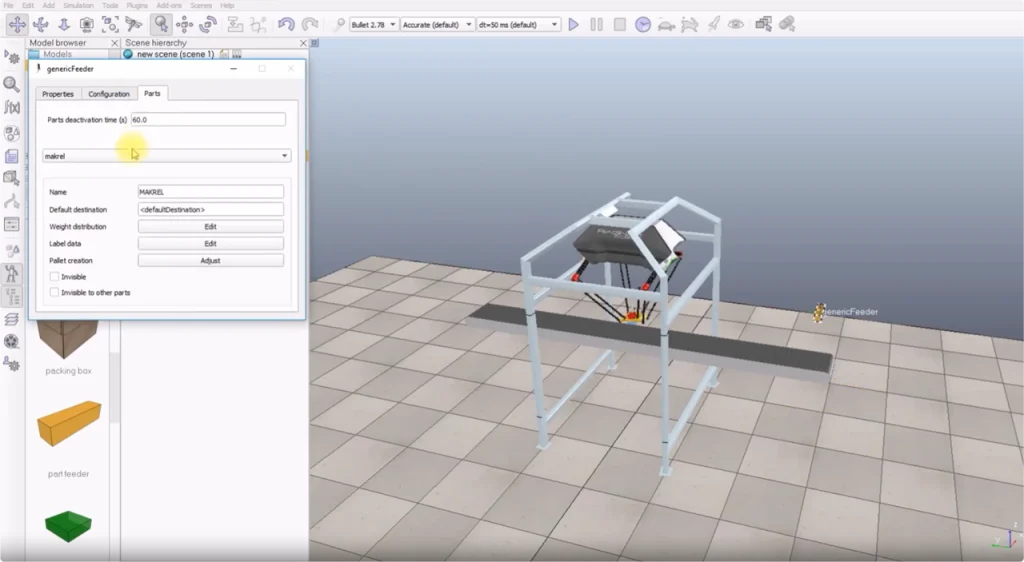
通过CoppeliaSim仿真验证平台与EtherCAT/CAN/TSN网络测试方案,帮助团队在数字空间提前跑通感知-规划-控制闭环,将联调前移,大幅缩短调试周期、降低实物试错成本。
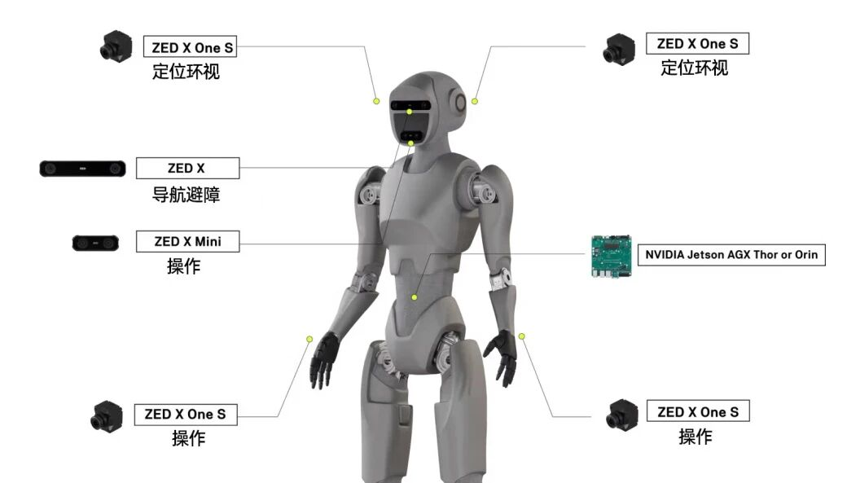
提供ZED系列视觉系统、伺服执行器与总线通讯板卡,作为对现有供应链的补充与优化,助力客户实现成本控制与性能提升。
“感知-思考-行动”三大核心模块,一站式解决具身智能落地难题
依托ZED双目相机,攻克动态场景三维重建与复杂光照适应性核心难题
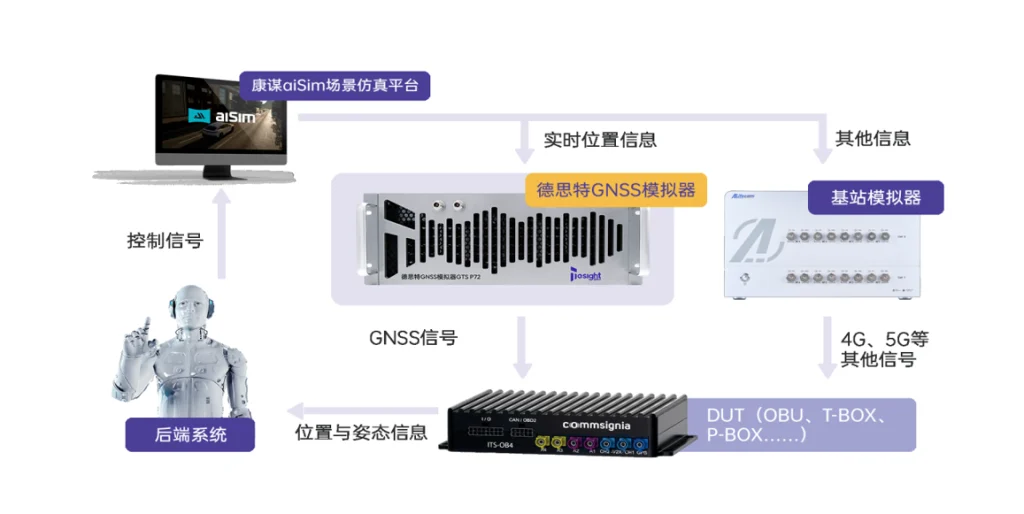
核心搭载GNSS模拟器,在实验室高保真复现多场景信号,实现定位模块精准注入与闭环验证
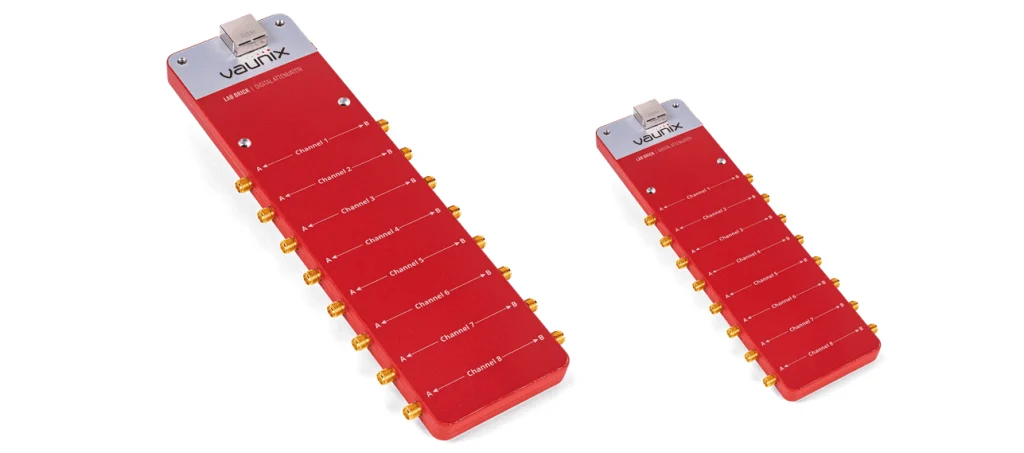
核心搭载信号衰落模拟设备,实时模拟复杂空间信号波动,验证通信边缘工况下自适应切换与稳传
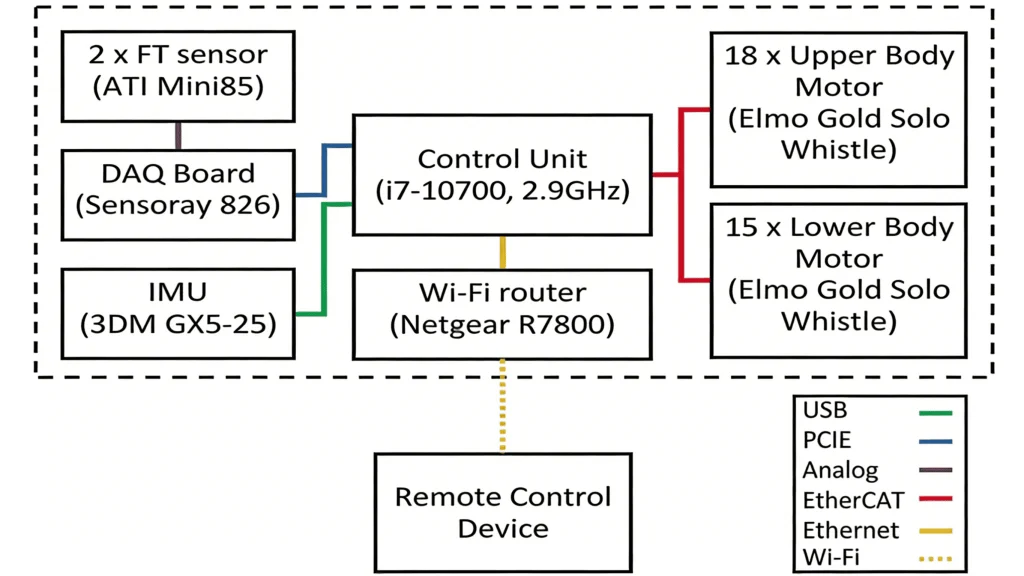
EtherCAT、CAN FD、TSN具身以太网,为人形机器人主干及其精密执行机构提供稳定、低时延的运动控制保障
集成五大物理引擎,实现复杂运动学设计、算法原型设计与数字孪生创建
高达2000TOPS算力与多通道视觉接口,高效运行复杂神经网络,为具身智能系统提供强劲加速
采用Berghof模块化控制器,打造高效本地控制架构,保障算法迅捷响应
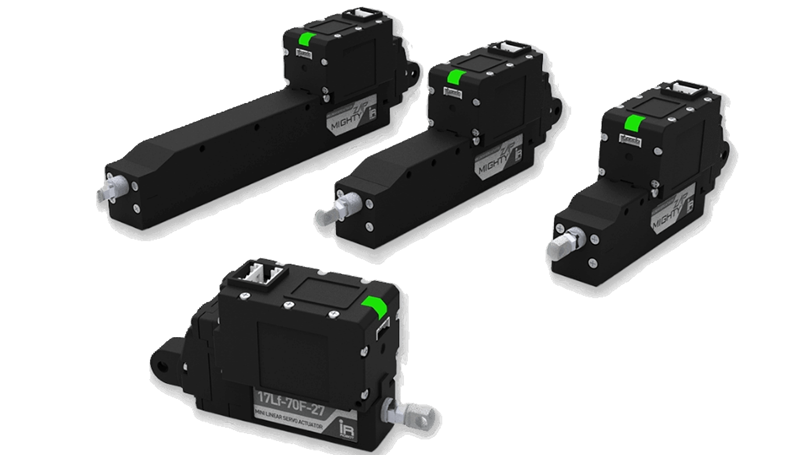
IR Robot小型线性伺服执行器,完美复刻仿生手的高精度复杂动作与抓取力控
已在多个领域、头部客户验证落地
如优必选、北京人形机器人创新中心等,提供从研发仿真到量产核心零部件的全周期支持
包括创业公司、高校及研究院所,聚焦于算法验证、原型开发与系统集成
在AMR、无人叉车、特种车辆等领域,提供感知与执行层的关键部件
丰富的项目交付经验,为您的具身智能研究与应用提供可靠参考
项目背景:机器人厂商需要研发针对汽车及3C行业的工规级具身智能机器人面临挑战:需在粉尘、油污、电磁干扰等极端工业环境下,实现毫米级的零部件识别与高频自主避障核心方案:友思特 ZED X 工业深度相机解决方案
客户价值:大幅缩减集成周期,助力客户成功打造出具备强自主意识的工规级机器人,实现从“实验室算法”到“工业生产力”的快速转化
合作客户:科大讯飞、聆动通用、中科光电、海微、穹彻智能、小雨智造、大晓机器人
友思特与安徽聆动通用机器人(科大讯飞旗下子公司)的具身机器人核心团队签订战略合作协议,ZED X搭载在其具身智能机器人中
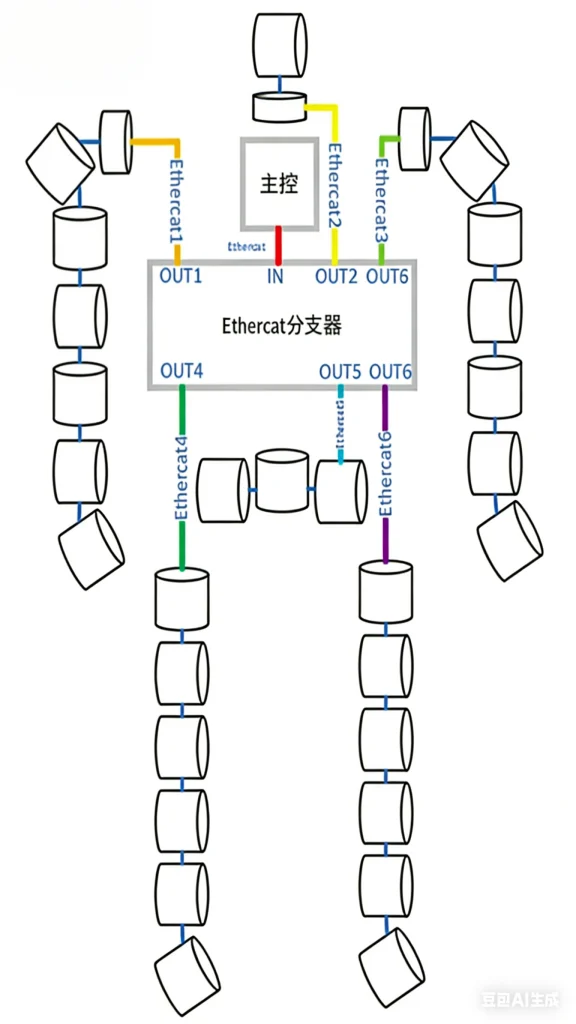
项目背景:机器人企业研发高性能人形机器人,用于复杂动态工况,需要高实时、高同步的总线通信系统保障多关节运动与传感协同面临挑战:人形机器人存在多关节同步精度差、传感数据传输时延高、环境姿态响应滞后且传统总线网络拓扑单一、拓展可靠性不足的行业痛点核心方案:虹科EtherCAT总线人形机器人通信解决方案
客户价值:不仅优化机器人运动控制能力、提升整机运行性能与环境适配性,还能简化开发流程、降低研发成本
合作客户:优必选、ART ROBOT、云深处
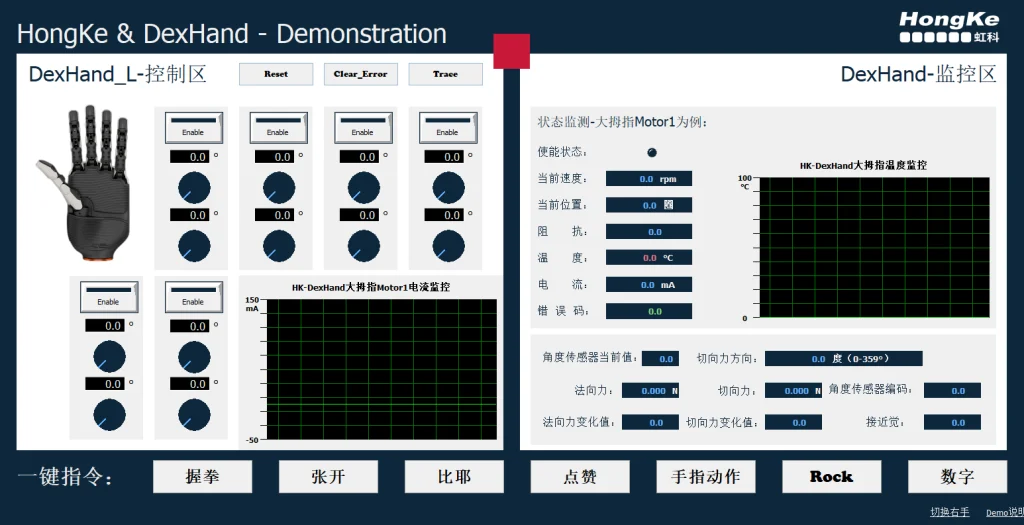
项目背景:机器人厂商研发人形机器人灵巧手,应用于工业分拣、医疗康复、科研实验等场景,需要高精度总线测试系统完成灵巧手运动控制、传感采集与性能检测面临挑战:灵巧手多关节协同运动复杂,对通信传输速率、时间戳精度、控制延迟要求严苛,亟需高精度总线测试方案实现多传感器信号采集与精细动作调试核心方案:虹科CAN FD灵巧手控制系统测试方案
客户价值:实现灵巧手全链路数据可追溯、测试流程可复现,大幅提升调试精度与研发效率
合作客户:灵巧智能、seed robotics
虹科提供的不只是零部件,而是从虚拟验证到物理部署的”最后一公里”完整工程能力
独家整合感知(友思特、德思特)、仿真(康谋)、控制与执行(宏集)的全链路能力,客户无需多头对接
不仅是硬件供应商,更是具备深厚工程服务能力的合作伙伴,拥有与头部客户合作的成功经验
深度支持ROS/ROS2、CODESYS等开源与工业标准生态,适配NVIDIA Jetson等主流计算平台
通过真实应用场景与工程实践,呈现一套可复用、可验证、可扩展的具身智能全栈解决方案
联系虹科,获取具身智能全链路解决方案的专属咨询与试用支持!